Skip to content
On a mission to provide quality educational resources for BIM Students
Colleges
About Course
New Syllabus (From 2021 Batch)
Old Syllabus (Upto 2020 Batch)
Contribute
Search for:
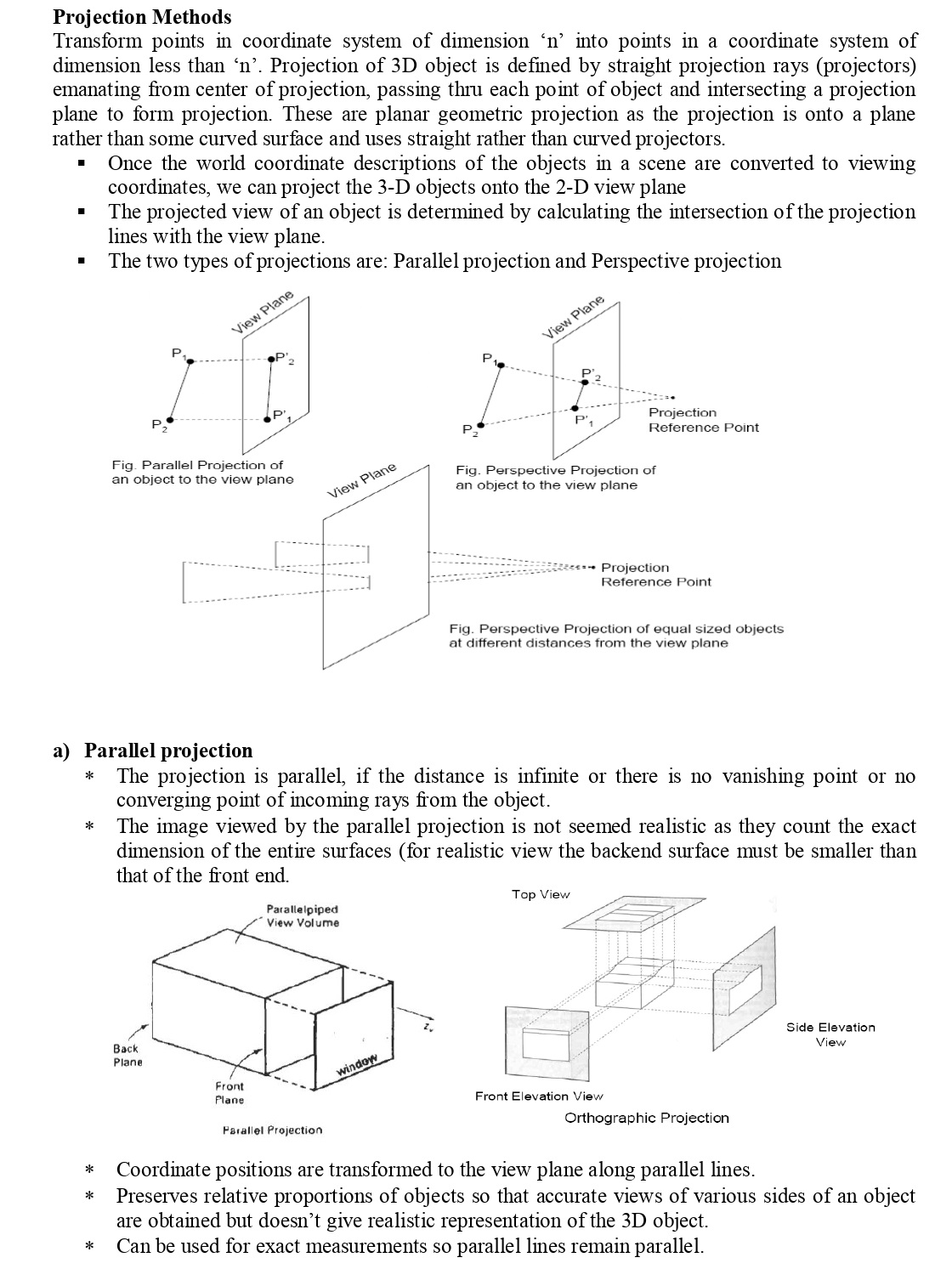
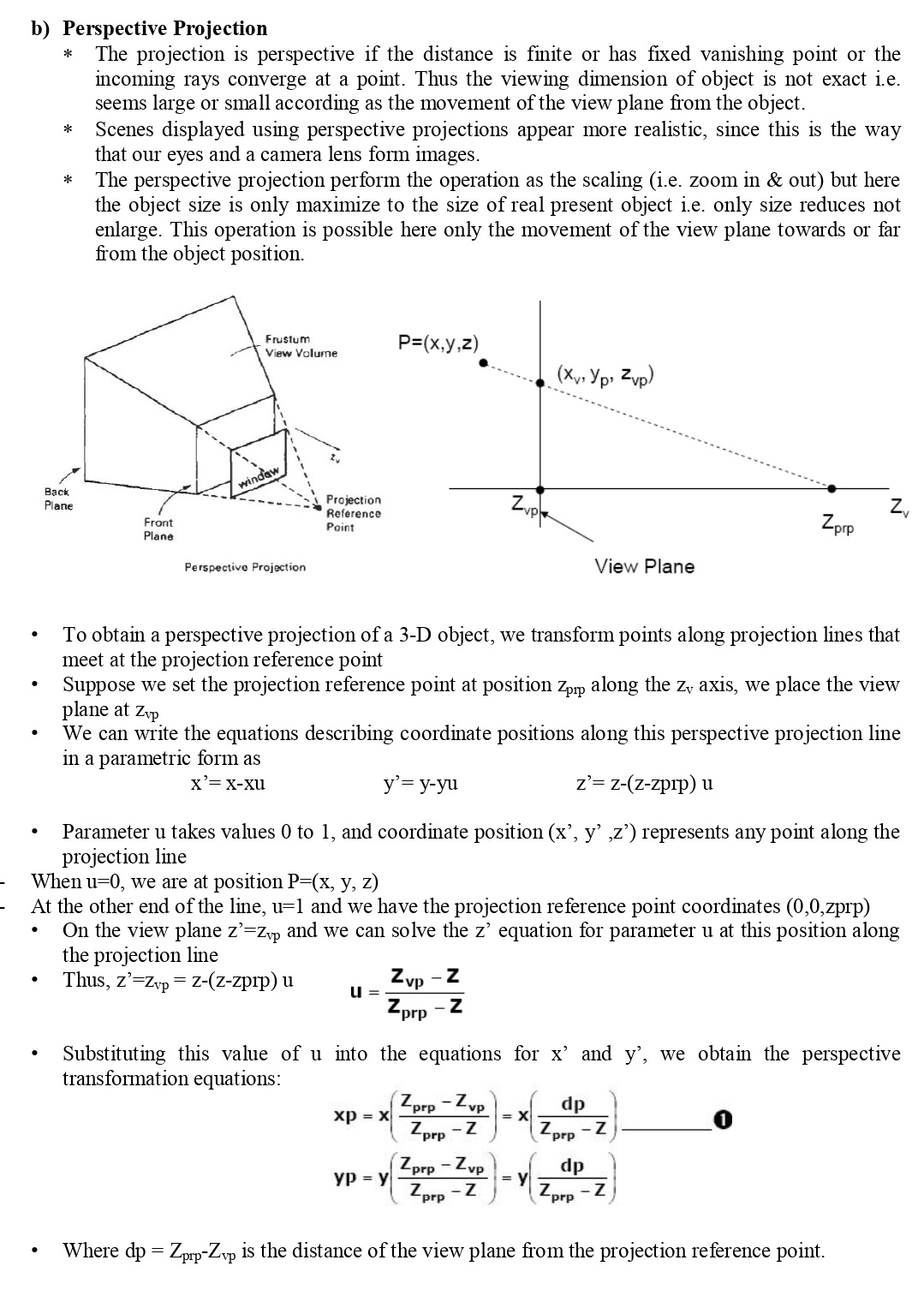
Unit 4 Three Dimensional Graph
5th Semester
November 26, 2018
BIM Notes
Post navigation
Unit 5: IPv6
Unit 6 :-CONTROLLING
error:
Content is protected !!
Colleges
About Course
New Syllabus (From 2021 Batch)
Old Syllabus (Upto 2020 Batch)
Contribute